
Edellisessä aiheessa&"Sähkömoottoreiden luokittelu [GG" ") selitin erilaisia harjatun tasavirtamoottorin (BDC) tyyppejä, kuten seuraavassa kaaviossa:

Tänään selitän harjaton tasavirtamoottori (BLDC) ja AC -induktiomoottorit.
Voit tarkistaa seuraavat aiheet tarkistettavaksi ja hyväksi.
Sähkömoottorien peruskomponentit
2- Harjaton tasavirtamoottori
|
Harjaton tasavirtamoottori |

Harjojen tasavirtamoottoreissa mekaaninen kommutaattori ja siihen liittyvät harjat ovat ongelmallisia useista syistä seuraavasti:
Harjaa kuluu ja se kasvaa dramaattisesti matalapaineisessa ympäristössä.
Harjoista tulevat kipinät voivat aiheuttaa räjähdyksiä, jos ympäristö sisältää räjähtäviä aineita.
Harjoista tuleva RF -kohina voi häiritä lähellä olevia televisioita tai elektronisia laitteita jne.
Harjaton tasavirtamoottori (BLDC) on yksi nopeasti suosituista moottorityypeistä. BLDC -moottoreita käytetään muun muassa laitteissa, autoteollisuudessa, ilmailuteollisuudessa, kuluttaja-, lääkintä-, teollisuusautomaatiolaitteissa ja instrumentoinnissa.
Kuten nimestä voi päätellä, BLDC -moottorit eivät käytä harjoja kommutointiin; sen sijaan ne kommunikoidaan sähköisesti.
BLDC -moottoreilla on monia etuja verrattuna harjattuihin tasavirtamoottoreihin ja induktiomoottoreihin. Muutamia näistä ovat:
Parempi nopeus verrattuna vääntömomenttiin.
Korkea dynaaminen vaste.
Korkea hyötysuhde.
Pitkä käyttöikä.
Äänetön toiminta.
Korkeammat nopeusalueet.
Lisäksi vääntömomentin suhde moottorin kokoon on suurempi, joten se on hyödyllinen sovelluksissa, joissa tila ja paino ovat kriittisiä tekijöitä.
Rakentaminen
BLDC -moottorit ovat eräänlainen synkronimoottori. Tämä tarkoittaa staattorin tuottamaa magneettikenttää ja roottorin tuottamaa magneettikenttää pyörii samalla taajuudella.
BLDC-moottoreita on saatavana yksivaiheisina, 2-vaiheisina ja 3-vaiheisina. Staattorissa on tyypiltään sama määrä käämiä. Näistä 3-vaihemoottorit ovat suosituimpia ja laajalti käytettyjä.
1- Staattori
|
BLDC -moottorin staattori |

BLDC -moottorin staattori koostuu pinotuista teräslaminaateista, joiden käämit on sijoitettu uriin, jotka on leikattu aksiaalisesti sisäkehää pitkin.
Useimmissa BLDC -moottoreissa on kolme staattorikäämiä, jotka on kytketty tähtiin. Kukin näistä käämistä on rakennettu lukuisiin käämeihin, jotka on yhdistetty toisiinsa käämityksen muodostamiseksi. Yksi tai useampi kela asetetaan rakoihin ja ne on kytketty toisiinsa käämityksen muodostamiseksi. Jokainen näistä käämistä on jaettu staattorin kehälle parillisen määrän napojen muodostamiseksi.
Ohjausteholähteestä riippuen voidaan valita moottori, jolla on staattorin oikea jännite. 48 volttia tai vähemmän jännite-luokiteltuja moottoreita käytetään autoteollisuudessa, robotiikassa, pienissä käsivarsiliikkeissä ja niin edelleen. 100 voltin tai korkeampia moottoreita käytetään laitteissa, automaatiossa ja teollisissa sovelluksissa.
2- Roottori
|
BLDC -moottorin roottori |

Roottori on valmistettu kestomagneetista ja voi vaihdella kahdesta kahdeksaan napapariin, joissa on vaihtoehtoiset pohjois- (N) ja etelä (S) -napa.
|
BLDC -roottorin magneetin asennot |
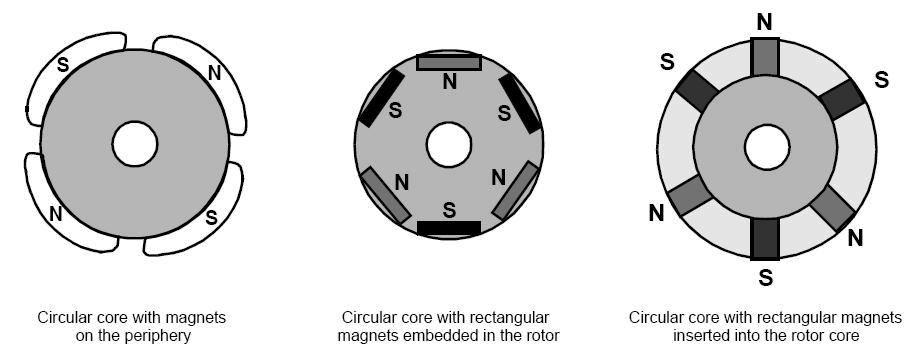
Roottorin vaaditun magneettikentän tiheyden perusteella roottorin valmistamiseksi valitaan oikea magneettinen materiaali. Ferriittimagneetteja käytetään perinteisesti kestomagneettien valmistukseen.
3- Hallin anturit
|
BLDC Hall -anturit |
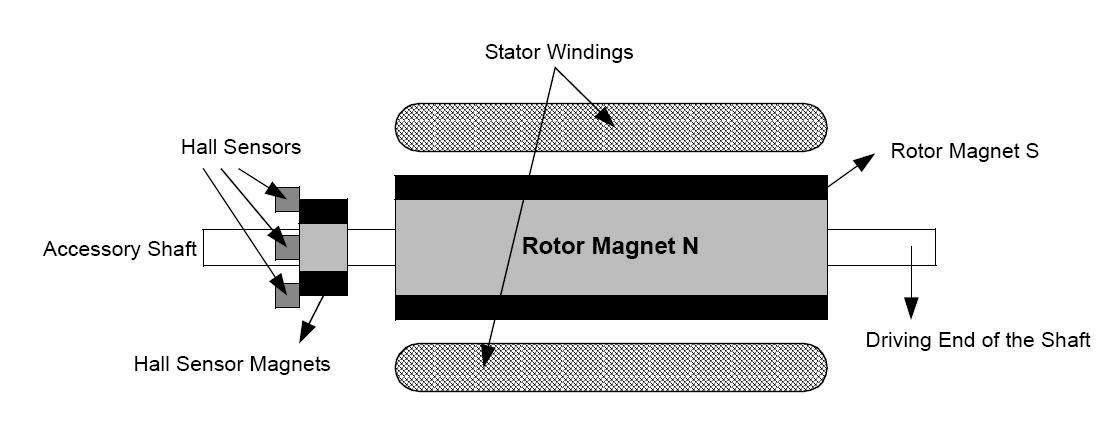
Toisin kuin harjattu tasavirtamoottori, BLDC -moottorin kommutointia ohjataan elektronisesti. BLDC -moottorin pyörittämiseksi staattorin käämit on syötettävä järjestyksessä. On tärkeää tietää roottorin asento, jotta ymmärretään, mikä käämitys saa jännitteen käynnistysjärjestyksen mukaisesti. Roottorin asento tunnistetaan staattoriin upotettujen Hall Effect -anturien avulla.
Useimmissa BLDC-moottoreissa on kolme Hall-anturia, jotka on upotettu staattoriin moottorin ei-käyttöpäässä.
Aina kun roottorin magneettiset navat kulkevat Hall -antureiden lähellä, ne antavat korkean tai matalan signaalin, mikä osoittaa, että N- tai S -napa kulkee anturien lähellä. Näiden kolmen Hall -anturisignaalin yhdistelmän perusteella voidaan määrittää tarkka kommutointisekvenssi.
Hall -antureiden fyysisen sijainnin perusteella on olemassa kaksi versiota ulostulosta. Hall -anturit voivat olla 60 ° tai 120 ° vaihesiirtymässä toisiinsa nähden. Tämän perusteella moottorin valmistaja määrittelee kommutointisekvenssin, jota on noudatettava moottoria ohjaettaessa.
Huomautus: Hall -anturit tarvitsevat virtalähteen. Jännite voi vaihdella 4 voltista 24 volttiin. Tarvittava virta voi vaihdella 5-15 sikotautia.
Toiminnan teoria
Jokaisessa kommutointisekvenssissä on yksi käämeistä, jotka on kytketty positiiviseen tehoon (virta tulee käämitykseen), toinen käämi on negatiivinen (virta poistuu käämityksestä) ja kolmas on jännitteettömässä tilassa.
Vääntömomentti syntyy staattorikäämien ja roottorin kestomagneettien välisen vuorovaikutuksen vuoksi.
Jotta moottori pysyisi käynnissä, käämien tuottaman magneettikentän tulisi siirtyä asentoon roottorin liikkuessa kiinni staattorikentästä. Se, mitä kutsutaan ”kuusivaiheiseksi kommutoimiseksi”, määrittelee käämien jännitteensyöttöjärjestyksen.
Kuusivaiheisessa kommutoinnissa käytetään vain kahta harjatonta DC-moottorin käämiä kerrallaan. Portaat vastaavat 60 sähköastetta, joten kuusi askelta tekee täydellisen 360 asteen pyörimisen. Yksi täysi 360 asteen silmukka voi ohjata virtaa, koska on vain yksi virtapolku. Kuusivaiheinen kommutointi on tyypillisesti hyödyllistä sovelluksissa, jotka vaativat nopeita ja kommutaatiotaajuuksia. Kuusivaiheisen harjaton tasavirtamoottorin vääntömomentti on yleensä pienempi kuin siniaaltoisen kommutoidun moottorin.
Tyypilliset BLDC -moottorisovellukset
Voimme luokitella BLDC -moottorin ohjaustyypin kolmeen päätyyppiin:
Jatkuva kuormitus.
Vaihtelevat kuormat.
Paikannussovellukset.
1- Sovellukset, joissa on jatkuva kuormitus:
Nämä ovat sovellustyyppejä, joissa muuttuva nopeus on tärkeämpää kuin nopeuden tarkkuuden pitäminen asetetulla nopeudella. Lisäksi kiihtyvyys- ja hidastusnopeudet eivät muutu dynaamisesti. Tämän tyyppisissä sovelluksissa kuorma on kytketty suoraan moottorin akseliin.
Esimerkiksi tuulettimet, pumput ja puhaltimet kuuluvat tämän tyyppisiin sovelluksiin. Nämä sovellukset vaativat edullisia ohjaimia, jotka toimivat enimmäkseen avoimessa silmukassa.
2- Sovellukset vaihtelevilla kuormilla:
Nämä ovat sovellustyyppejä, joissa moottorin kuormitus vaihtelee nopeusalueella. Nämä sovellukset voivat vaatia nopeaa ohjaustarkkuutta ja hyviä dynaamisia vasteita.
Esimerkiksi,
Kodinkoneet: pesukoneet, kuivausrummut ja kompressorit.
Autoteollisuudessa polttoainepumpun ohjaus, elektroninen ohjaus, moottorin ohjaus ja sähköajoneuvojen ohjaus.
Ilmailu- ja avaruusteollisuudessa on useita sovelluksia, kuten sentrifugit, pumput, robotti -käsiohjaimet, gyroskooppisäätimet ja niin edelleen.
Nämä sovellukset voivat käyttää nopeuden takaisinkytkentälaitteita ja ne voivat toimia puoliksi suljetussa silmukassa tai kokonaan suljetussa silmukassa.
3- Paikannussovellukset:
Suurin osa teollisuuden ja automaation sovelluksista kuuluu tähän luokkaan. Tämän luokan sovelluksissa on jonkinlainen voimansiirto, joka voi olla mekaanisia hammaspyöriä tai ajastinhihnoja tai yksinkertainen hihnakäyttöinen järjestelmä. Näissä sovelluksissa nopeuden ja vääntömomentin dynaaminen vaste ovat tärkeitä. Näissä sovelluksissa voi myös olla usein pyörimissuunnan vaihtaminen.
Nämä järjestelmät toimivat enimmäkseen suljetussa piirissä.
Lopuksi vertailu harjatun tasavirtamoottorin (BDC) ja harjaton tasavirtamoottorin (BLDC) välillä on alla olevan kuvan mukainen.

Toinen: AC -moottorit
Vaihtovirtamoottoreissa käytetään sähkövirtaa, joka muuttaa suuntaa säännöllisin väliajoin.
DC -moottoreiden tärkein etu AC -moottoreihin verrattuna on se, että nopeutta on vaikeampi hallita AC -moottoreilla. Tämän kompensoimiseksi vaihtovirtamoottorit voidaan varustaa taajuusmuuttajilla, mutta parannettu nopeuden säätö heikentää tehon laatua.
AC -moottoreiden tyypit:

Nykyään yleisesti käytettävät vaihtovirtamoottorit voidaan jakaa kahteen laajaan luokkaan:
Induktiomoottorit (asynkroniset).
Synkroniset moottorit.
Lineaariset moottorit.
Nämä kaksi moottorityyppiä eroavat toisistaan roottorikentän virityksen toimittamisessa seuraavasti:
Induktiomoottoreissa ei ole ulkoisesti kohdistettua roottorin viritystä, ja sen sijaan roottorin käämiin indusoidaan virta pyörivän staattorin magneettikentän vuoksi.
Synkronimoottoreissa roottorin käämiin kohdistetaan kenttäherätys. Tämä ero kentän herätyksessä johtaa eroihin moottorin ominaisuuksissa, mikä puolestaan johtaa erilaisiin suojaus- ja ohjausvaatimuksiin kullekin moottorityypille.
1- Induktiomoottori
Induktiomoottorit ovat yleisimpiä moottoreita, joita käytetään alan eri laitteisiin.
Induktiomoottori: ns. Koska jännite indusoituu roottorissa (näin ollen harjoja ei tarvita), mutta jotta tämä tapahtuisi, roottorin pyörimisen on oltava pienemmällä magneettikentän nopeudella indusoidun jännitteen olemassaolon mahdollistamiseksi.
Siksi tarvitaan uusi termi kuvaamaan induktiomoottoria, joka on luisto.
Luiska:
Käyttömomentti voi olla olemassa vain, jos varjostusrenkaassa on indusoitu virta. Se määräytyy renkaan virran perusteella ja voi olla olemassa vain, jos renkaassa on vaihtelua. Siksi varjostusrenkaassa ja pyörivässä kentässä on oltava nopeusero. Siksi edellä kuvatun periaatteen mukaisesti toimivaa sähkömoottoria kutsutaan ”asynkroniseksi moottoriksi”.
Synkronisen nopeuden (Ns) ja varjostusrenkaan nopeuden (N) välistä eroa kutsutaan "luistoksi" (s) ja se ilmaistaan prosentteina synkronisesta nopeudesta.
S=(Nsyn - Nm)/ Nsyn
Missä lipsahdus on? Liukastuminen on yksi tärkeimmistä muuttujista induktiokoneiden ohjauksessa ja käytössä.
s=0: jos roottori käy synkronisella nopeudella.
s=1: jos roottori on paikallaan.
s on –ve: jos roottori käy nopeudella, joka ylittää synkronisen nopeuden.
s on + ve: jos roottori käy synkronisen nopeuden alapuolella.
Edut:
Yksinkertainen muotoilu, kestävä, edullinen ja helppo huoltaa.
Laaja tehoalue: murtoluku hevosvoimaa - 10 MW.
Käytä olennaisesti tasaisella nopeudella kuormittamattomasta täyteen kuormaan.
Sen nopeus riippuu virtalähteen taajuudesta.
Nykyään suosituin moottori pienillä ja keskisuurilla hevosvoimilla.
Erittäin vankkarakenteinen.
DC -moottorit on korvattu alueilla, joilla perinteisiä tasavirtamoottoreita ei voida käyttää, kuten kaivos- tai räjähdysvaarallisissa ympäristöissä. Kaksi tyyppiä moottorin rakenteesta riippuen; Oravahäkki tai liukurengas.
Haitat:
Ei ole helppoa saada nopeudensäätöä.
Edellyttää optimaalista nopeuden säätöä taajuusmuuttaja-sähkökäytöllä.
Suurin osa niistä toimii hitaalla teholla.
Toimintaperiaate:
Staattori on yleensä kytketty verkkoon ja staattori magnetoidaan.
Staattorin magneettikenttä leikkaa roottorin käämit ja tuottaa indusoidun jännitteen roottorin käämiin.
Koska roottorin käämit ovat oikosulussa, sekä oravahäkille että haavaroottorille, ja roottorin käämissä indusoidut virrat.
Roottorivirta tuottaa toisen magneettikentän.
Vääntömomentti syntyy näiden kahden magneettikentän vuorovaikutuksen seurauksena.
Rakenne:
Induktiomoottorissa on kaksi pääosaa
1- Staattori
|
Induktiomoottorin staattori |

Tämä on moottorin liikkumaton osa. Valuraudasta tai kevytmetallista valmistetussa rungossa on ohuiden piiteräslevyjen rengas (noin 0,5 mm paksu). Levyt eristetään toisistaan hapettamalla tai eristävällä lakalla. Magneettipiirin ”laminointi” vähentää hystereesi- ja pyörrevirtahäviöitä.
Levyissä on staattorikäämiä varten lovet, jotka tuottavat pyörivän kentän (kolme käämiä 3-vaihemoottorille). Jokainen käämitys koostuu useista käämeistä. Tapa, jolla kelat on liitetty yhteen, määrittää moottorin napaparien lukumäärän ja siten pyörimisnopeuden.
2- Roottori
Tämä on moottorin liikkuva osa. Kuten staattorin magneettinen piiri, se koostuu pinotuista levyistä, jotka on eristetty toisistaan ja muodostavat moottorin akseliin kiinnitetyn sylinterin.
Induktiomoottoreiden tyypit
|
Induktiomoottoreiden tyypit |

Induktiomoottorit luokitellaan roottorityypin mukaan seuraavasti:
A- Orava-häkkiroottori:

|
Orava-häkki roottori |

Se koostuu paksuista johtavista tangoista, jotka on upotettu rinnakkaisiin rakoihin. Nämä tangot on oikosuljettu molemmista päistä oikosulkurenkaita käyttämällä.
B- Haavaroottori:

|
Haavaroottori |

Siinä on kolmivaiheinen kaksikerroksinen hajautettu käämitys. Se on kierretty niin monille napoille kuin staattori. Kolme vaihetta on kytketty sisäisesti ja muut päät on kytketty akseliin kiinnitettyihin liukurenkaisiin, joiden päällä on harjat.
Kumpikin yllä olevista induktiomoottoreista voidaan luokitella kahteen pääryhmään seuraavasti:
I- Yksivaiheiset induktiomoottorit:
Näissä on vain yksi staattorikäämi, ne toimivat yksivaiheisella virtalähteellä, niissä on oravahäkki roottori ja ne tarvitsevat laitteen moottorin käynnistämiseksi. Tämä on ylivoimaisesti yleisin moottorityyppi, jota käytetään kodinkoneissa, kuten tuulettimissa, pesukoneissa ja vaatteidenkuivaimissa, ja sovelluksiin, joiden teho on enintään 3-4 hevosvoimaa.
Yksivaiheisissa induktiomoottoreissa on myös haavaroottori, jolla on erinomaiset käynnistys- ja kiihdytysominaisuudet, ja ne ovat ihanteellisia arvokäyttäjille, maatilamoottorisovelluksille, nostimille, lattianhoitokoneille, ilmakompressoreille, pesulaitteille ja kaivoslaitteille.
II- Kolmivaiheiset induktiomoottorit:
Pyörivän magneettikentän tuottaa tasapainoinen kolmivaiheinen syöttö. Näillä moottoreilla on suuritehoiset ominaisuudet, niissä voi olla oravahäkki tai haavaroottorit (vaikka 90%: lla on oravahäkki roottori), ja ne käynnistyvät itsestään. Arvioiden mukaan noin 70% alan moottoreista on tämän tyyppisiä, ja niitä käytetään esimerkiksi pumpuissa, kompressoreissa, kuljetinhihnoissa, raskaissa sähköverkoissa ja hiomakoneissa. Niitä on saatavana 1/3 - satoja hevosvoimia.
Katsotaanpa nyt ensimmäinen induktiomoottoriluokitus, joka perustuu edellä mainittuihin tyyppeihin:
1- Yksivaiheinen, oravahäkki, induktiomoottori:
Tässä luokassa on monia tyyppejä, kuten alla olevassa kuvassa näkyy.

A- Varjostetut pole-induktiomoottorit
Rakenne ja toimintaperiaate:
|
Varjostetut pole-induktiomoottorit |

Varjossapaisilla moottoreilla on vain yksi pääkäämi ja ei käynnistyskäämiä. Aloitetaan käyttämällä mallia, joka soittaa jatkuvan kuparisilmukan pienen osan jokaisen moottorin navan ympärille. Tämä "varjostaa" napa -osaa ja saa varjostetun alueen magneettikentän jäämään varjoisan alueen kentän taakse. Kahden kentän reaktio saa akselin pyörimään.
Edut:
Koska varjostetulla napamoottorilla ei ole käynnistyskäämiä, käynnistyskytkintä tai kondensaattoria, se on sähköisesti yksinkertainen ja halpa.
Nopeutta voidaan ohjata pelkästään vaihtelemalla jännitettä tai moninapaisella käämityksellä.
Mekaanisesti varjostettu napainen moottorirakenne mahdollistaa suuren tuotannon.
Näitä moottoreita pidetään yleensä kertakäyttöisinä, mikä tarkoittaa, että ne ovat paljon halvempia vaihtaa kuin korjata.
Haitat:
Sen alhainen käynnistysmomentti on tyypillisesti 25–75% nimellismomentista.
Se on luistamoottori, jonka käyntinopeus on 7–10% synkronisen nopeuden alapuolella.
Yleensä tämän moottorityypin hyötysuhde on hyvin alhainen (alle 20%).
Sovellukset:
Alhaiset alkukustannukset sopivat varjostetuille moottorille pienitehoisiin tai kevyisiin sovelluksiin. Ehkä niiden suurin käyttö on kotikäyttöön tarkoitetuissa moninopeuksisissa tuulettimissa. Mutta alhainen vääntömomentti, alhainen hyötysuhde ja vähemmän kestävät mekaaniset ominaisuudet tekevät varjostetut napaiset moottorit epäkäytännöllisiksi useimpiin teollisiin tai kaupallisiin tarkoituksiin, joissa korkeammat kierrosluvut tai jatkuva käyttö ovat normeja.
Seuraavassa aiheessa selitän edelleen muita yksivaiheisia, oravahäkki -induktiomoottorityyppejä.





